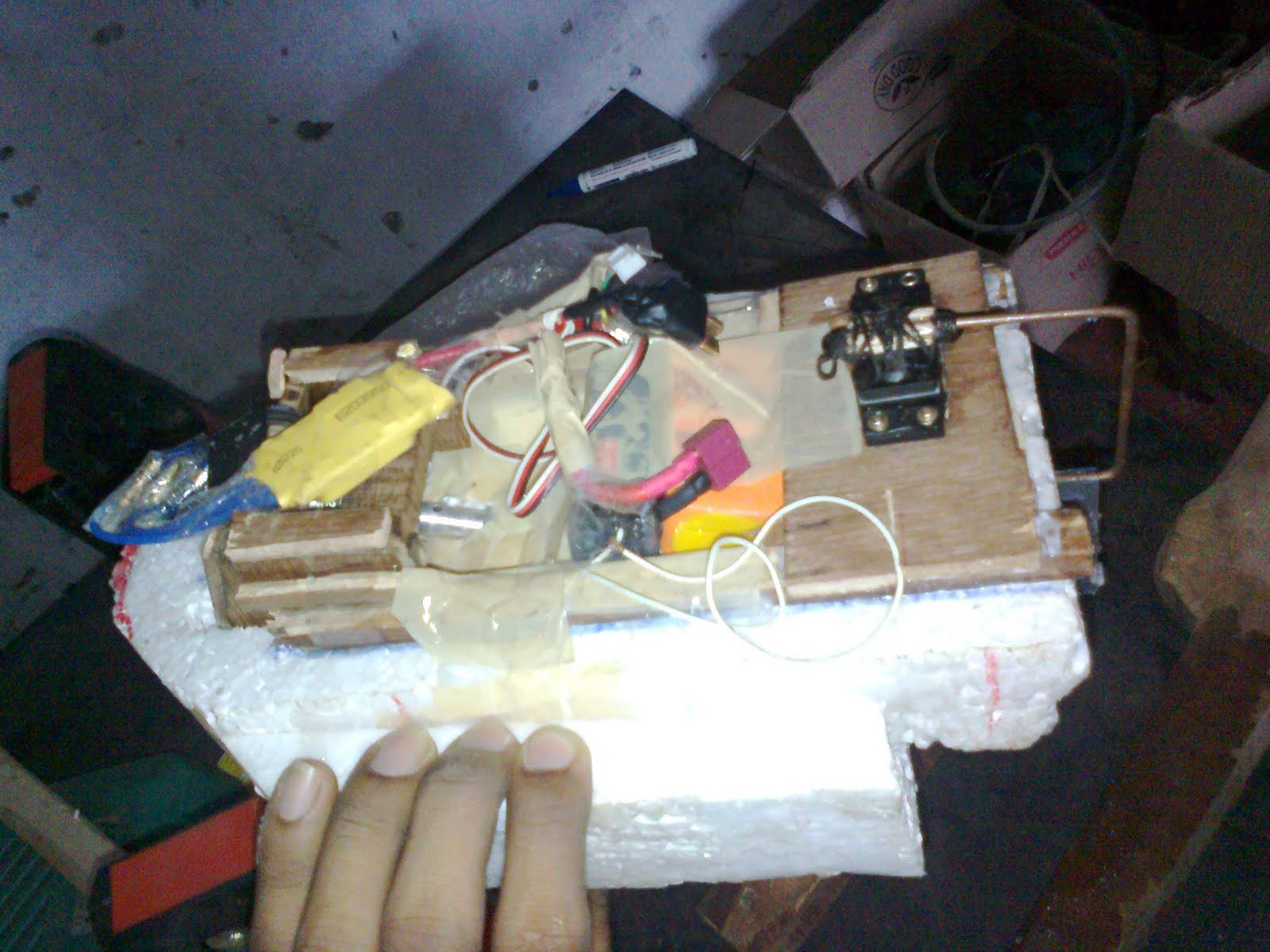

we made a RC Boat for TATHVA( http://bit.ly/aIWjaK ) and won 1st prize.here i am posting some pics and videos of boat.
Description of components:
1)Brushless outrunner CF2812(maximum power @80 % efficiency 120w )
2)ESC 18A (inbuilt BEC)
3)6ch tx& rx(72mhz)
4)aquaprop ,propeller
5)Servo motor ,rudder
6)some plywood thermocol and a LOT of super glue ;)
our runtime was 10 seconds......with no obstacles hit....